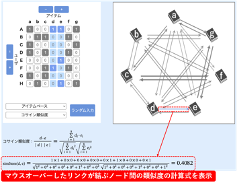
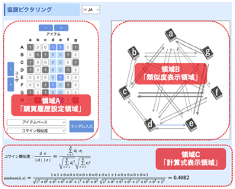
画面構成
画面は,大きく3つの領域で構成している.図において,領域Aはユーザとアイテムの購買履歴を設定する「購買履歴設定領域」,領域Bはユーザの場合は人型のピクトグラムを,アイテムの場合は本のピクトグラムをノードとして,ノード間の類似度をネットワークグラフの形式で表示する「類似度表示領域」,領域Cは類似度の計算式を表示する「計算式表示領域」である.
購買履歴設定領域
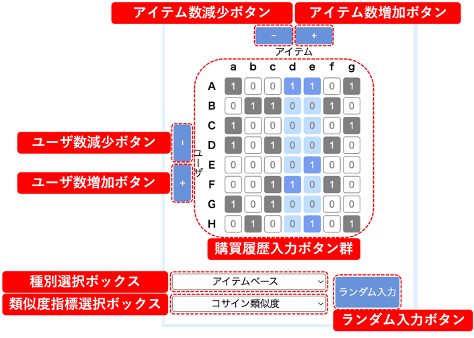
領域A「購買履歴設定領域」のスクリーンショットを図3に示す.領域Aは,「アイテム数増加/減少ボタン」「ユーザ数増加/減少ボタン」「購買履歴入力ボタン群」「ランダム入力ボタン」「種別選択ボックス」「類似度指標選択ボックス」で構成されている.
「アイテム数増加/減少ボタン」「ユーザ数増加/減少ボタン」をクリックすることで,アイテム数およびユーザ数をそれぞれ5から9までの自然数に変更できる.アイテム数を変更すると「購買履歴入力ボタン群」の列数が,ユーザ数を変更すると「購買履歴入力ボタン群」の行数が選択した値になる.
「購買履歴入力ボタン群」の各ボタンのラベルの値は初期状態では0である.ボタンを押下すると,ラベルの値が0の場合は1に,1の場合は0に変化する.なお,「ランダム入力ボタン」を用いると,「購買履歴入力ボタン群」のそれぞれのボタンのラベルの値が0か1にランダムで決定される.
「種別選択ボックス」では,ユーザベースとアイテムベースを選択可能である.また,「類似度指標選択ボックス」では,類似度指標としてコサイン類似度とジャッカード係数を選択可能である.いずれのボックスもプルダウンリストとなっている.
類似度表示領域
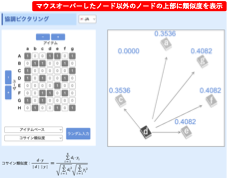
領域B「類似度表示領域」の表示例を図4に示す.領域Bでは,領域A「購買履歴設定領域」の「種別選択ボックス」がアイテムベースの場合は本のピクトグラム,ユーザベースの場合は人型のピクトグラムでノードを表現している.また,本あるいは人型のピクトグラム間のリンクを矢印で表現している.
ノードをマウスオーバーすると,マウスオーバーしたノード以外のノードの上部に,マウスオーバーしたノードとの類似度を表示する.
計算式表示領域
領域C「計算式表示領域」は,上部と下部に分かれており,上部に領域Aの「類似度指標選択ボックス」で設定した計算手法に対応する計算式が表示される.画面下部には,領域Bでリンクをマウスオーバーしたときに,対応する計算式が表示される.