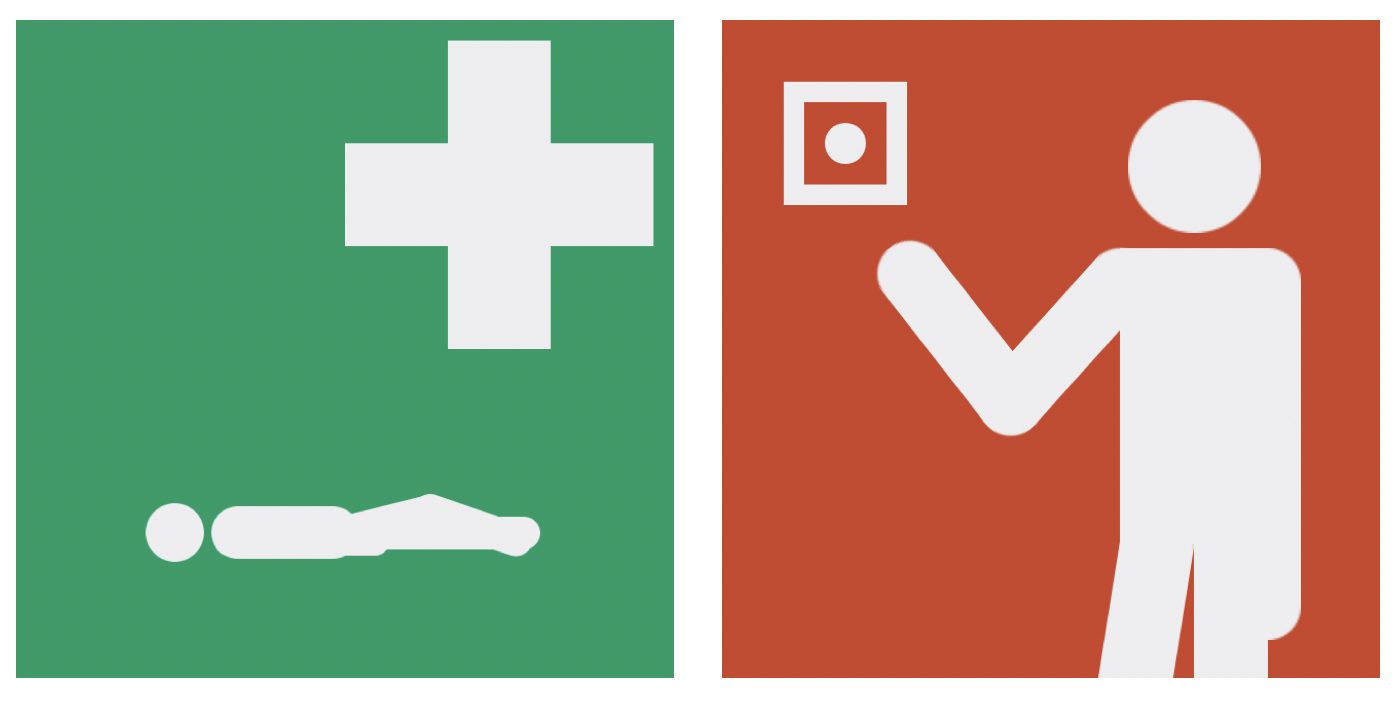
安全に関するピクトグラムを作成する場合,これまでは,安全モード(S)が用意されていました.安全モードは,背景色は白色,人型ピクトグラム及び図形描画は緑色で表示されます.これは非常口サインを意識した配色でした.一方実際には,緑色背景に人型ピクトグラム及び図形描画が白色で表示される安全標識,と赤色背景に人型ピクトグラム及び図形描画が白色で表示される火気安全標識が主です.
そこで以下のように,安全に関する命令SG及びSRを追加しました.後方互換性のため,S命令の仕様は変更せず,新たにSG及びSR命令を定義しています.
| 命令の様式 | 処理 |
|---|---|
| S | 安全モード(Safety mode)以外で実行すると安全モードに変更する。 安全モードで再度命令すると通常モードに変更する。安全モード中に描画 した線画の色は人型ピクトグラムと同じ緑色となる。 |
| SG | 安全緑モード(Safety Green mode)以外で実行すると安全緑モードに変更する。 安全緑モードで再度命令すると通常モードに変更する。安全緑モード中に描画 した線画の色は人型ピクトグラムと同じ白色となる。 |
| SR | 安全赤モード(Safety Red mode)以外で実行すると安全赤モードに変更する。 安全赤モードで再度命令すると通常モードに変更する。安全赤モード中に描画 した線画の色は人型ピクトグラムと同じ白色となる。 |
| 英語表記 | 英語 | 日本語 | にほんご |
|---|---|---|---|
| S | Safety | 安全 | あんぜん |
| SG | SafetyGreen | 安全緑 | あんぜんみどり |
| SR | SafetyRed | 安全赤 | あんぜんあか |
SG及びSR命令を使うことで,以下のようなピクトグラム(左 SG命令,右 SR命令)が作成できます.